咨询电话: 020-88888888

路径规划学习笔记之一—概述!
发布于 2024-07-01 13:59 阅读()
该系列笔记主要是记录在学习路径规划中的知识,其中主要侧重实际的应用,会记录实际中遇到的问题,对于细节部分介绍有些欠缺,力求能够将学习到的知识应用到实际中。
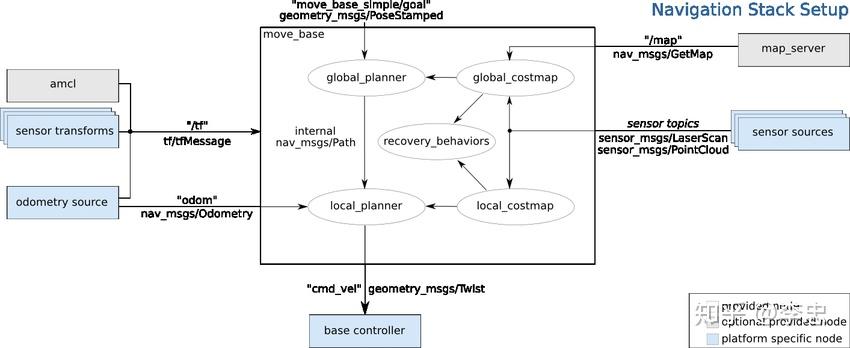
整体的导航框架如上图所示,有感知、建图、定位、规划等模块,而规划还分成:全局规划和局部规划,该文所讨论的内容主要是其中的规划部分,着重是关于全局规划的
在规划模块中首先明确经常容易混淆的几个概念:
运动规划Motion Planning
路径规划Path Planning
轨迹规划Trajectory Planning
- 路径规划+轨迹规划=运动规划
- 路径规划:已知几何约束的情况下(障碍物、地图信息),求解一条路径,也即是找到一条无碰撞的路径。
- 轨迹规划:已知运动学约束(时间约束、速度约束等)情况下求解轨迹。
当然也有的路径规划算法在搜索路径过程中也将动力学约束(Hybrid A*)考虑进去,本系列的所涉及的规划算法主要是路径规划,也会涉及一部分轨迹规划。
路径规划(path planning)目的是为了寻找成本最小的路径, 需要给出的条件包括: 地图, 起始地点, 目标地点, 成本函数.

路径规划主要由两部分组成,前端是路径搜索,后端是轨迹规划,最后生成一条机器人可执行的路径。
路径搜索——在地图中,搜索出一条避开障碍物的轨迹;
轨迹规划(优化)——对搜索到的轨迹进行优化,从而符合机器人的运动学和动力学约束。
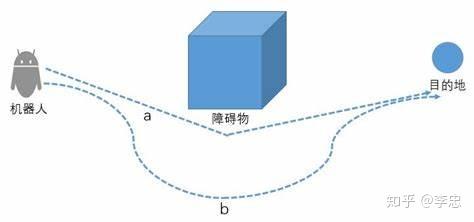
如上图所示,a路径为前端路径搜索得出的,为一条无碰撞的路径,b为a路径经过轨迹规划过的路径,该路径满足运动学和动力学约束,为一条机器人可执行的路径。
路径规划(搜索)的算法主要可分成这三类,后续的章节也是按照以下的顺序进行介绍的。
DIjkstra、A*、JPS
PRM、RRT、RRT*
Hybrid A*
更多的内容可看下面的介绍:
焉知科技:路径规划五种算法简述及对比DIjkstr和A*基本的流程相似,只是A*带有启发函数,是一种启发式搜索算法,下一章将对DIjkstr和A*作相关介绍。
新闻资讯
 上海农商银行推“世界白金鑫卡” TOP1
上海农商银行推“世界白金鑫卡” TOP1 -
2
 强化业绩补偿监管,支持环保企业 05-15
强化业绩补偿监管,支持环保企业 05-15 -
3
 利率大幅单边上行可能性不大 05-15
利率大幅单边上行可能性不大 05-15 -
4
 商标注册的八大作用 05-11
商标注册的八大作用 05-11 -
5
 10月19日湖人vs勇士数据统 07-01
10月19日湖人vs勇士数据统 07-01 -
6
 加快经济结构优化升级 07-01
加快经济结构优化升级 07-01 -
7 上海市卫健委:标准化是推动中医 07-01
-
8
 ai画画生成器哪个好用?这几款 07-01
ai画画生成器哪个好用?这几款 07-01 -
9
 NBA2022-2023赛季常 07-01
NBA2022-2023赛季常 07-01














